In Linux, managing network traffic is essential for a robust and secure IT infrastructure. In this post, we focus on Ubuntu—whether running on a virtual machine, Windows Subsystem for Linux (WSL), or a physical machine running Ubuntu 24.04. We will configure per-domain DNS rules using dnsmasq. This guide also covers additional considerations for WSL and systems using netplan.
Configuring Ubuntu for Local DNS with dnsmasq
When using Ubuntu, you might be using netplan for network configuration. In that case, you need to configure netplan to use the local DNS server provided by dnsmasq. Make sure your netplan configuration (e.g., /etc/netplan/01-netcfg.yaml) sets the DNS to 127.0.0.1, so that all DNS queries are forwarded to your local dnsmasq server.
Disabling systemd-resolved
Ubuntu often uses systemd-resolved by default, which can interfere with your custom DNS setup. To prevent conflicts, disable and stop systemd-resolved using the following commands:
This ensures that systemd-resolved does not override your DNS settings.
Note for WSL Users
If you are running Ubuntu under WSL, you need to prevent WSL from overwriting your DNS settings. Edit or create the file /etc/wsl.conf with the following content:
[network]generateResolvConf=false
Then, create or edit the /etc/resolv.conf file to include:
nameserver127.0.0.1
This ensures that your system uses the local dnsmasq server.
Installing and Setting Up dnsmasq
Step 1: Install dnsmasq
First, update your package list and install dnsmasq:
sudoaptupdatesudoaptinstalldnsmasq
Step 2: Enable and Verify the dnsmasq Service
After installing dnsmasq, enable the service and check its status to ensure it is running correctly:
You should see that dnsmasq is active and running. This local DNS server will be used to resolve all DNS queries forwarded from your system.
Step 3: Configure dnsmasq
Edit the /etc/dnsmasq.conf file to set up your DNS rules. Here’s an example configuration:
# Default upstream DNS serversserver=8.8.8.8server=8.8.4.4# Domain-specific DNS serversserver=/domain01.tld/172.30.0.1server=/domain02.tld/172.30.0.2
Explanation:
The lines server=8.8.8.8 and server=8.8.4.4 set Google’s public DNS as the default upstream DNS servers. When a query does not match any domain-specific rule, dnsmasq will forward the request to these servers.
The lines server=/domain01.tld/172.30.0.1 and server=/domain02.tld/172.30.0.2 specify that queries for any host within domain01.tld and domain02.tld should be resolved by the DNS servers at 172.30.0.1 and 172.30.0.2, respectively.
After making your changes, save the file and restart dnsmasq to apply the new configuration:
sudosystemctlrestartdnsmasq
Verifying the DNS Configuration
You can use the dig command to verify that your DNS rules are working as expected. Note that when your system’s resolver is set to use dnsmasq at 127.0.0.1, the dig output will always show SERVER: 127.0.0.1#53. However, dnsmasq will forward the query internally to the appropriate upstream DNS server based on your configuration.
Below are two examples: one for a public domain (google.com) and one for a domain that should be resolved by your custom DNS rule (example01.tld).
Example 1: Verifying a Public Domain (google.com)
Run the following command:
diggoogle.com
Simulated Output:
; <<>> DiG 9.11.3-1ubuntu1-Ubuntu <<>> google.com;; global options:+cmd;; Got answer:;; ->>HEADER<<- opcode:QUERY, status:NOERROR, id:12345;; flags:qr rd ra; QUERY:1, ANSWER:2, AUTHORITY:0, ADDITIONAL:1;; QUESTION SECTION:;google.com. IN A;; ANSWER SECTION:google.com. 300 IN A 172.217.164.110google.com. 300 IN A 172.217.164.78;; Query time:23 msec;; SERVER:127.0.0.1#53(127.0.0.1);; WHEN:Wed Feb 20 10:00:00 UTC 2025;; MSG SIZE rcvd:113
Internal Process:
Step 1: The query for google.com is sent to the local dnsmasq server at 127.0.0.1.
Step 2: dnsmasq examines its configuration and sees that google.com does not match any domain-specific rules.
Step 3: It then forwards the query to the default upstream DNS servers (8.8.8.8 and 8.8.4.4).
Step 4: The upstream server resolves google.com and returns the result back to dnsmasq, which then passes it back to the client.
Example 2: Verifying a Domain with a Custom DNS Rule (example01.tld)
Run the following command:
digexample01.tld
Simulated Output:
; <<>> DiG 9.11.3-1ubuntu1-Ubuntu <<>> example01.tld;; global options:+cmd;; Got answer:;; ->>HEADER<<- opcode:QUERY, status:NOERROR, id:67890;; flags:qr rd ra; QUERY:1, ANSWER:1, AUTHORITY:0, ADDITIONAL:1;; QUESTION SECTION:;example01.tld. IN A;; ANSWER SECTION:example01.tld. 60 IN A 172.30.0.1;; Query time:25 msec;; SERVER:127.0.0.1#53(127.0.0.1);; WHEN:Wed Feb 20 10:00:10 UTC 2025;; MSG SIZE rcvd:82
Internal Process:
Step 1: The query for example01.tld is sent to dnsmasq at 127.0.0.1.
Step 2: dnsmasq checks its configuration and finds a matching domain-specific rule for example01.tld, which directs the query to the DNS server at 172.30.0.1.
Step 3: dnsmasq forwards the query internally to 172.30.0.1 without exposing this step in the client’s dig output.
Step 4: The upstream server at 172.30.0.1 resolves the query, and dnsmasq returns the answer to the client.
In both cases, while the client sees the query being handled by 127.0.0.1, dnsmasq intelligently directs the queries to the appropriate upstream servers based on your configuration. This seamless internal forwarding is what allows you to manage per-domain DNS resolution effectively.
Conclusion: Why Use Per-Domain DNS Configuration?
Implementing per-domain DNS configuration on Linux Ubuntu is a powerful way to gain granular control over your network’s behavior. This approach is particularly useful for:
Enterprise Environments: Where internal domains require different DNS resolutions from external queries.
Development and Testing: Allowing developers to redirect domain requests to local or test servers.
Security: Enhancing network security by segregating traffic and reducing reliance on external DNS servers.
By configuring dnsmasq with domain-specific rules and ensuring that your system points to the local DNS (especially important when using netplan or running under WSL), you optimize network performance and security tailored to your specific needs.
Introducción a la Infraestructura de Clave Pública (PKI)
Una PKI, o Infraestructura de Clave Pública, es un sistema que gestiona certificados digitales y claves para garantizar comunicaciones seguras. Vamos a desglosar los conceptos básicos.
Conceptos Clave
PKI: Es el sistema completo que conecta Certificados de Autoridad (CA), claves y certificados para garantizar la confianza entre entidades.
CA (Certificate Authority): Es el “jefe” de la PKI. Firma y valida certificados, garantizando que son de confianza.
Certificado: Documento digital que incluye una clave pública, información sobre la entidad, y la firma del CA. Es como un pasaporte digital.
Solicitud de Certificado: Es un “borrador” del certificado que una entidad envía al CA para que lo firme.
Par de Claves (Keypair): Un conjunto de dos claves: una pública (para compartir) y otra privada (secreta). Por ejemplo, la pública es como tu dirección de correo y la privada como la contraseña.
¿Qué es un CA y por qué es importante?
El CA es el núcleo de una PKI y su clave privada es extremadamente sensible porque firma todos los certificados. Para protegerla, se recomienda mantenerla en un entorno seguro, como un sistema dedicado o incluso desconectado de la red.
¿Cómo funciona todo esto?
Creación del CA: Se genera un par de claves y la estructura necesaria para gestionar certificados.
Solicitud de Certificado: Un cliente (por ejemplo, un servidor VPN) crea un par de claves y envía su solicitud al CA.
Firma y Certificado: El CA verifica la solicitud y utiliza su clave privada para firmar el certificado, que luego devuelve al cliente.
¿Cómo se verifica un certificado? Ejemplos prácticos
La verificación de certificados varía según el contexto, y quiero explicarlo con dos ejemplos claros: una conexión a una VPN, donde yo tengo un par de claves y un certificado, y una conexión a un banco, donde no necesito un par de claves, solo la confianza en la CA.
Ejemplo 1: Conexión VPN (yo tengo mi par de claves y certificado)
Cuando me conecto a una VPN, tanto el cliente como el servidor necesitan un par de claves (pública y privada) y certificados firmados por la misma CA. El proceso es el siguiente:
Yo genero mi par de claves y solicito un certificado al CA, que verifica mi identidad y firma mi certificado.
Cuando intento conectar al servidor VPN, este me presenta su certificado.
Yo verifico que el certificado del servidor fue firmado por el CA en el que confío.
Luego, envío mi propio certificado al servidor, que hace la misma verificación con su copia del CA.
Si todo es válido, ambos usamos nuestras claves privadas para intercambiar información cifrada y establecer una conexión segura.
Por ejemplo, si trabajo remotamente y necesito acceder a la red de mi empresa, configuro un cliente VPN con mi certificado y claves. El servidor verifica que yo soy quien digo ser y me deja entrar solo si la verificación es correcta.
Ejemplo 2: Conexión a un banco (sin par de claves, solo confianza en la CA)
Cuando accedo a la web de mi banco desde mi navegador, no necesito un par de claves personal. Simplemente, confío en los certificados emitidos por las CA incluidas en la lista de confianza de mi navegador. Así funciona:
El servidor del banco me envía su certificado.
Mi navegador verifica que el certificado fue firmado por una CA en su lista de confianza y que este no está caducado ni revocado.
Si la verificación es exitosa, se establece una conexión segura mediante TLS/SSL.
Durante la conexión, el banco usa su clave privada para demostrar que es legítimo, firmando datos que mi navegador valida con la clave pública incluida en el certificado del banco.
Por ejemplo, cuando accedo a https://mi-banco.com, mi navegador me muestra un candado en la barra de direcciones. Esto significa que ha validado el certificado del banco y ahora la conexión es segura. Aunque yo no tengo claves en este caso, confío en la autoridad que firmó el certificado del banco.
Vamos a crear nuestra propia PKI y la gestión de certificados usando easy-rsa
Easy-RSA es una herramienta poderosa y sencilla para gestionar una infraestructura PKI (Infraestructura de Clave Pública). Con ella puedo emitir certificados para servidores VPN, páginas web, y clientes que necesiten conexiones seguras. Aquí explicaré cómo utilizar Easy-RSA para construir esta infraestructura y cómo interpretar sus resultados.
Importante mencionar que easy-rsa no son más que unos scripts que simplifican el uso de OpenSSL que es la verdadera herramienta que hay por detrás gestionando los certificados, claves y demás.
Obtener easy-rsa:
gitclonehttps://github.com/OpenVPN/easy-rsa.git
Configuración del archivo vars en Easy-RSA
El archivo vars permite configurar parámetros básicos y avanzados antes de iniciar el PKI con init-pki, ahorrando tiempo y garantizando consistencia. Para empezar, copio vars.example a vars y relleno las partes que me interesen, como:
Datos del certificado: País, ciudad, organización, etc.
Claves y algoritmos: Tamaño (2048 bits) y tipo (RSA o EC).
Primero, descargo Easy-RSA desde su repositorio oficial. Como no requiere instalación, simplemente extraigo el archivo comprimido (.tar.gz para Linux/Unix o .zip para Windows) en el directorio que prefiera.
Para comenzar, inicializo el directorio de PKI con:
./easyrsainit-pki
Esto crea una estructura de directorios básica para gestionar los certificados. El directorio pki incluye:
private/: Guarda claves privadas (debe mantenerse muy seguro).
reqs/: Contiene solicitudes de certificados.
issued/: Almacena certificados emitidos.
ca.crt: El certificado de la CA (Autoridad Certificadora).
private/ca.key: La clave privada de la CA, crítica para la seguridad de toda la infraestructura.
Paso 2: Crear la Autoridad Certificadora (CA)
La CA es el corazón de mi PKI. Es quien firma los certificados y garantiza su validez. Creo la CA con:
./easyrsabuild-ca
Durante este proceso, defino un nombre común (Common Name, CN) para identificar mi CA, y se me pedirá configurar una frase de contraseña fuerte para proteger la clave privada (ca.key). Este archivo es extremadamente sensible, y su seguridad es crítica.
El resultado principal de este paso es:
ca.crt: El certificado público de la CA, que compartiré con clientes y servidores para verificar certificados.
Paso 3: Generar claves y solicitudes de certificados
Para que un cliente o servidor VPN funcione, primero genero un par de claves (privada y pública) junto con una solicitud de certificado (CSR). Esto se hace con:
./easyrsagen-req<nombre-del-certificado|FQDN># muy importante usar FQDN (Fully Qualified Domain Names) para evitar# problemas de matching con los hostnames usados en la conexión.
Por ejemplo, para un servidor VPN:
./easyrsagen-reqvpn-server.example.tld
El comando genera dos archivos:
private/<nombre-del-certificado>.key: La clave privada. Este archivo debe permanecer en el servidor o cliente correspondiente y nunca compartirse.
reqs/<nombre-del-certificado>.req: La solicitud de certificado (CSR). Este archivo se envía al CA para ser firmado.
Paso 4: Firmar solicitudes de certificados
Una vez que tengo la solicitud (.req), la importo en el CA y la firmo. Esto se realiza con:
1. Importar la solicitud
# solo hay que hacer este paso si el certificate request # lo hemos copiado de otra máquina. Esto lo coloca en path# para que todo vaya automático, incluidas futuras # renovaciones../easyrsaimport-req/the-path/vpn-server.example.tld.reqvpn-server.example.tld
2. Firmar la solicitud
./easyrsasign-reqservervpn-server.example.tld
Easy-RSA generará un certificado firmado en pki/issued/servidor-vpn.crt. Este archivo es lo que el servidor VPN utiliza para identificarse de forma segura ante sus clientes.
Paso 5: Configuración de un servidor y cliente VPN
Servidor VPN
Para configurar un servidor VPN (como OpenVPN), necesitaré los siguientes archivos generados por Easy-RSA:
Clave privada (private/servidor-vpn.key): Usada por el servidor para encriptar las comunicaciones.
Certificado firmado (issued/servidor-vpn.crt): Garantiza que el servidor es confiable.
Certificado de la CA (ca.crt): certificado y clave pública de nuestra PKI.
Estos archivos se colocan en el directorio de configuración del servidor VPN y se referencian en su configuración.
Cliente VPN
Hay que repetir el paso 4, en este caso una buena práctica es poner como “nombre-del-certificado” el nombre del usuario, o el cliente, que pide el certificado de acceso. En algunos casos de uso, eso permite no tener que pasar por un proceso de autenticación.
Después de generar la petición y haberla importado, como indica la primera parte del paso 5. Hay que ir muy en cuidado con el segundo paso. Al firmar el certificate request hay que hacerlo indicando que su uso será de cliente, no de servidor.
# creamos el certificate request./easyrsagen-reqmi-nombre-de-usuario# importamos el certificado si es necesario en la PKI./easyrsaimport-req/the-path/mi-nombre-de-usuario.reqmi-nombre-de-usuario# firmamos el certificate request indicando el uso como cliente./easyrsasign-reqclientmi-nombre-de-usuario
Después de firmar el certificate-request ya tenemos los ficheros que deberá usar el cliente para conectarse al servidor:
Clave privada (private/mi-nombre-de-usuario.key): Usado por el cliente para encriptar las comunicaciones.
Certificado firmado (issued/mi-nombre-de-usuario.crt): Garantiza que el servidor es confiable.
Certificado de la CA (ca.crt): certificado y clave pública de nuestra PKI.
NOTA:
Cuando se firma un certificado las posibles opciones a seleccionar son:
client – es para TLS client, típicamente usado para usuarios de VPN, o para navegadores Web
server – para TLS server, típicamente servidores Web y servidores VPN.
ca – cuando queremos crear CA (Certificate Authorities) en cascada, esto emite un certificado intermedio. Técnicamente, lo llaman chaining certificate.
serverClient – certificado que serve tanto para cliente como para servidor TLS.
Paso 6: Configuración para servidores web
El proceso es similar para un servidor web (HTTPS). Genero una solicitud de certificado para el dominio del servidor (por ejemplo, mi-servidor.com) y la firmo con la CA. Los archivos necesarios serán:
Clave privada (private/mi-servidor.key): Exclusiva del servidor web.
Certificado firmado (issued/mi-servidor.crt): Identifica al servidor web.
Certificado de la CA (ca.crt): Permite a los navegadores validar la conexión.
Estos archivos se configuran en el servidor web (como Apache o Nginx) para habilitar HTTPs.
Gestión de certificados emitidos, CRL y Validación en Tiempo Real con OCSP
Easy-RSA no solo permite emitir y revocar certificados, sino que también facilita la gestión de la revocación mediante la generación de listas de certificados revocados (CRL) y la implementación de validación en tiempo real a través de OCSP. Cuando se detecta que una clave privada ha sido comprometida o un certificado ya no es necesario, se procede a su revocación:
Revocar un certificado: Utiliza el comando: ./easyrsa revoke <nombre-del-certificado> Esto marca el certificado como revocado dentro de la base de datos de la PKI.
Generar la CRL: Una vez revocados los certificados, es necesario generar una nueva lista de revocación. Esto se realiza con: ./easyrsa gen-crl Este comando genera dos ficheros:
crl.pem: La CRL en formato Base64.
crl.der: La CRL en formato binario. Estos archivos deben publicarse en un servidor accesible para que los clientes puedan descargarlos y comprobar el estado de los certificados.
Aunque la CRL es la solución tradicional para gestionar certificados revocados, presenta limitaciones como el tamaño de la lista y la necesidad de descargarla por completo en cada comprobación. Para solventar estas deficiencias, se puede implementar OCSP (Online Certificate Status Protocol).
OCSP es un protocolo definido en el RFC 2560 que permite a un cliente consultar el estado de un certificado de forma puntual y en tiempo real, sin tener que procesar toda la CRL. Entre sus ventajas destacan:
Información actualizada: Permite obtener el estado de revocación de un certificado al momento de la consulta.
Eficiencia: Reduce el tráfico y la carga de procesamiento en el cliente, ya que se consulta solo el certificado específico.
Privacidad: Evita la exposición de información potencialmente sensible contenida en la CRL.
Escalabilidad: Emplea mecanismos optimizados (a menudo basados en motores de base de datos) para gestionar consultas incluso en entornos con un gran número de certificados.
Implementación de un Servidor OCSP con OpenSSL:
Para poner en marcha un servidor OCSP, utiliza el siguiente comando:
Esta consulta permite verificar de forma inmediata si el certificado está revocado o sigue siendo válido.
Integrar la generación y publicación de CRL con un servidor OCSP proporciona un mecanismo completo para la gestión de certificados emitidos. Mientras que la CRL ofrece una solución tradicional basada en la descarga de una lista completa, OCSP permite a los clientes obtener el estado de un certificado de forma ágil y en tiempo real, optimizando el proceso de validación y reduciendo la carga en la red. Este enfoque combinado asegura que, tanto en entornos de pruebas como en producción, se disponga de mecanismos robustos para mantener la integridad y seguridad de la infraestructura PKI.
Renovar un certificado
Normalmente, poco antes de caducar un certificado se pide su renovación. Esto emitirá otro fichoero de certificado firmado por la CA como el que se emetió la primera vez, pero con una nueva fecha de caducidad:
es buena idea ejecutar el siguiente comando para asegurarse que el viejo certificado queda obsoleto:
./easyrsarevoke-renewed<nombre-del-certificado>
esto nos acaba forzando a generar una nueva lista de certificados revocados. O sea, hay que ejecutar:
./easyrsagen-crl
y en consecuencia distribuir el nuevo fichero CRL.
Conclusión
Easy-RSA simplifica la creación y gestión de una infraestructura PKI, lo que me permite emitir y administrar certificados para VPNs y servidores web. Sus outputs, como las claves privadas, certificados firmados, y el certificado de la CA, son los componentes esenciales para garantizar conexiones seguras. Con esta herramienta, puedo construir mi propia red confiable para asegurar tanto servidores como clientes en diferentes escenarios.
The architecture for this setup is illustrated below:
Install udp2raw, Wireguard and generate keys
cd/tmpwgethttps://github.com/wangyu-/udp2raw/releases/download/20230206.0/udp2raw_binaries.tar.gztarxvfzudp2raw_binaries.tar.gzcpudp2raw_amd64/usr/local/bin/udp2rawrmudp2raw*# based on Ubuntuaptinstallwireguard# we'll work on /etc/wireguardcd/etc/wireguard# generate privatekeywggenkey|sudotee/etc/wireguard/private.keysudochmodgo=/etc/wireguard/private.key# obtain public keysudocat/etc/wireguard/private.key|wgpubkey|sudotee/etc/wireguard/public.key
When eveything is installend and configured, just run in all endpoints next commands:
sudowg-quickupwg0# for status check:wg# udp2raw logs at:tail-f/var/log/udp2raw.log# enable automatic wireward service in Ubuntusudosystemctlenablewg-quick@wg0.service# start and stop service like alwayssudosystemctlstartwg-quick@wg0.servicesudosystemctlstopwg-quick@wg0.servicesudosystemctlstatuswg-quick@wg0.service
Configuration Files
Endpoint A /etc/wireguard/wg0
# local settings for Endpoint A[Interface]PrivateKey=WMUerfcUpSxUlOp1UmaS2uwelnk8AxhAFrlIWpjheWM=Address=192.168.111.1/24ListenPort=51822# receive wg through udp2rawMTU=1342PreUp=udp2raw-s-l167.99.130.97:55055-r127.0.0.1:51822-k"The2password."-a>/var/log/udp2raw.log2>&1&PostDown=killalludp2raw||true# Enable NAT for traffic forwarding (corporate and fallback internet access)PreUp=echo1>/proc/sys/net/ipv4/ip_forward||truePreUp=iptables-tnat-IPOSTROUTING-oeth0-jMASQUERADE||truePreDown=iptables-tnat-DPOSTROUTING-oeth0-jMASQUERADE||true# remote settings for Endpoint B[Peer]PublicKey=XWl8HeAinHlAZTvaCXDlmO9n/CQLg5qH8jmtROK4jBg=AllowedIPs=192.168.111.2/32PersistentKeepalive=120# remote settings for Endpoint C[Peer]PublicKey=I+gi8l9QRe00W8pTpp8CSoIabz/RXXQXwquXj7eKNwU=AllowedIPs=192.168.111.3/32PersistentKeepalive=120
Endpoint B /etc/wireguard/wg0
# Endpoint B[Interface]PrivateKey=+BB3NI2SUYeKcRoPrZE2+Ot5KnLZJBycPzJ17kfbn34=Address=192.168.111.2/24# Route configuration for public IPPreUp=iproutedeldefault||truePreUp=iprouteadd167.99.130.97via10.2.0.1deveth0||truePostDown=iproutedel167.99.130.97via10.2.0.1deveth0||truePostDown=iprouteadddefaultvia10.2.0.1||trueMTU=1342PreUp=udp2raw-c-l127.0.0.1:50001-r167.99.130.97:55055-k"The2password."-a>/var/log/udp2raw.log2>&1&PostDown=killalludp2raw||true# Endpoint A[Peer]PublicKey=z73wM1b7fhMRA8fmeQw4FntRvgJ9JwTdsQHssXHg3DE=Endpoint=127.0.0.1:50001AllowedIPs=0.0.0.0/0PersistentKeepalive=120
Endpoint C /etc/wireguard/wg0
# Endpoint C[Interface]PrivateKey=YCGzsfeed8QumpfE8bdWRheMzBiUsTB7vXj0YVOQQX0=Address=192.168.111.3/24# Route configuration for public IPPreUp=iproutedeldefault||truePreUp=iprouteadd167.99.130.97via10.2.0.1deveth0||truePostDown=iproutedel167.99.130.97via10.2.0.1deveth0||truePostDown=iprouteadddefaultvia10.2.0.1||trueMTU=1342PreUp=udp2raw-c-l127.0.0.1:50001-r167.99.130.97:55055-k"The2password."-a>/var/log/udp2raw.log2>&1&PostDown=killalludp2raw||true# Endpoint A[Peer]PublicKey=z73wM1b7fhMRA8fmeQw4FntRvgJ9JwTdsQHssXHg3DE=Endpoint=127.0.0.1:50001AllowedIPs=0.0.0.0/0PersistentKeepalive=120
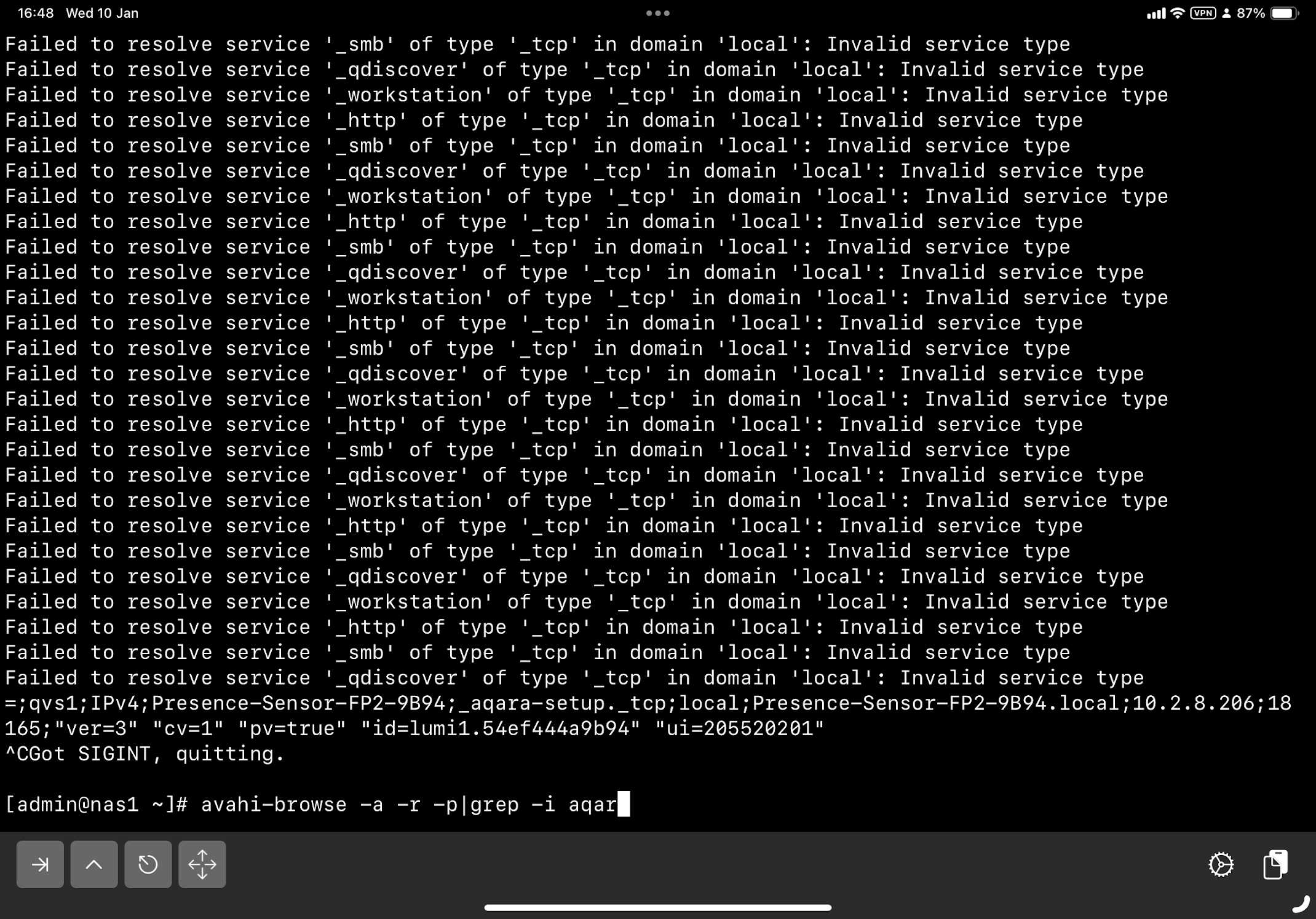
mdns-scan is a simple tool that scans for mDNS/DNS-SD announcements on the local network and lists discovered services. It doesn’t require the full Avahi daemon; it directly uses multicast DNS queries.
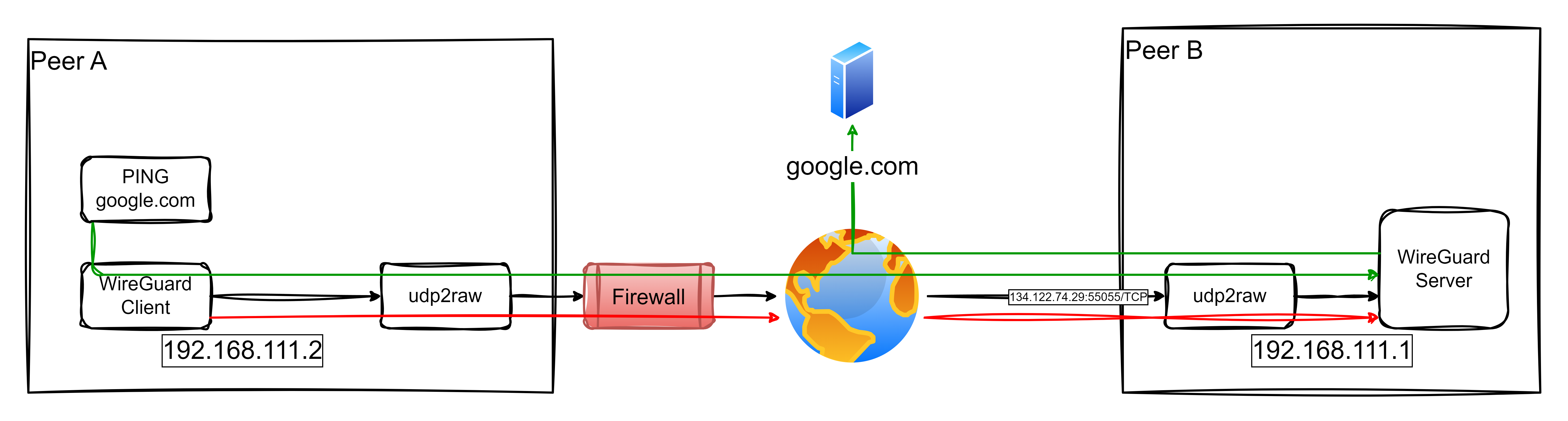
In this post, I’ll share how I set up a WireGuard VPN over TCP using udp2raw, which provides secure access to corporate networks and serves as a fallback for internet access when customer networks impose heavy restrictions. Inspired by Pro Custodibus, this solution enables IoT gateways to seamlessly connect to both the company’s internal services and the broader internet under constrained conditions.
Scenario Overview
The architecture for this setup is illustrated below:
Key Features of the Solution:
Access to Corporate Networks: IoT Gateways securely connect to the corporate network for accessing internal services.
Fallback Internet Access: When the customer’s network restricts internet access but allows TCP connections to the company infrastructure, the IoT Gateway routes its internet traffic through the company’s network.
How It Works:
Endpoint A (Client): An IoT Gateway connects through the restrictive customer network.
Endpoint B (Server): The WireGuard server is accessible via a public IP (134.122.74.29) on TCP port 55055.
Traffic flows through a TCP tunnel created with udp2raw, enabling the gateway to securely access the corporate network or relay internet traffic via the company’s infrastructure.
This dual-purpose setup ensures robust connectivity for IoT devices even in challenging environments.
Video Demonstration (in Spanish)
I’ve created a video demonstration in Spanish showcasing the entire setup and functionality of this scenario. The video walks through the following steps:
Explaining the problem and network constraints.
Demonstrating the configuration of both endpoints (client and server).
Showing the connection initiation and testing, including how traffic flows through the VPN tunnel.
Verifying fallback internet access through the company network.
This video is ideal for those who prefer visual explanations or need extra guidance in implementing this solution.
Configuration Files
1. Endpoint B (server, /etc/wireguard/wg0.conf)
This configuration allows Endpoint B to act as a gateway for both corporate access and fallback internet connectivity:
# local settings for Endpoint B[Interface]PrivateKey=EMqyADu4Xeu95ZpNZE97FET5eKzN1WSwBkeBWtX1yGg=Address= 192.168.111.1/32ListenPort= 51822# receive wg through udp2rawMTU= 1342PreUp= udp2raw -s -l 134.122.74.29:55055 -r 127.0.0.1:51822 -k "The2password." -a >/var/log/udp2raw.log 2>&1 &PostDown= killall udp2raw || true# Enable NAT for traffic forwarding (corporate and fallback internet access)PreUp= echo 1 > /proc/sys/net/ipv4/ip_forward || truePreUp= iptables -t nat -I POSTROUTING -o eth0 -j MASQUERADE || truePreDown= iptables -t nat -D POSTROUTING -o eth0 -j MASQUERADE || true# remote settings for Endpoint A[Peer]PublicKey=Xt70DJy8ldPcDNW4YM2Dt94n16pTQKFxhmvpgKvJyng=AllowedIPs= 192.168.111.2/32PersistentKeepalive= 120
Key Points:
NAT Rules: These rules enable traffic originating from Endpoint A to use Endpoint B for accessing the internet.
MTU Adjustment: The MTU is set to 1342 to prevent fragmentation issues over the TCP tunnel.
Assumptions:
eth0, is the name of the interface for reaching Internet.
192.168.111.0/24 is available for point-to-point connections in the tunnels.
ud2raw is in PATH.
Don’t re-use my pub and private keys. Neither the pre-shared key of used by udp2raw.
Endpoint A (client, /etc/wireguard/wg0.conf)
This configuration sets up Endpoint A to route all traffic (corporate and internet) through Endpoint B:
[Interface]PrivateKey=yAxByb468bAuMdg5S6AlfYkxbeYDOMEKxdaJ7d2p83g=Address= 192.168.111.2/32# Route configuration for public IPPreUp= ip route del default || truePreUp= ip route add 134.122.74.29 via 10.2.0.1 dev eth0 || truePostDown= ip route del 134.122.74.29 via 10.2.0.1 dev eth0 || truePostDown= ip route add default via 10.2.0.1 || trueMTU= 1342PreUp= udp2raw -c -l 127.0.0.1:50001 -r 134.122.74.29:55055 -k "The2password." -a >/var/log/udp2raw.log 2>&1 &PostDown= killall udp2raw || true[Peer]PublicKey= VUN2JqZiGQ1V46PDoFECw/nMs3/o6n8PvGMV+ad+Hww=Endpoint= 127.0.0.1:50001AllowedIPs= 0.0.0.0/0PersistentKeepalive= 120
Key Points:
Fallback Internet Routing: The AllowedIPs = 0.0.0.0/0 directive ensures all traffic is routed through Endpoint B, including internet traffic.
Dynamic Route Adjustments: The PreUp and PostDown commands manage routes for efficient fallback connectivity.
Here’s the improved Implementation Steps section based on your feedback and expertise in WireGuard and udp2raw:
Implementation Steps
This section outlines the precise steps required to set up the WireGuard VPN over TCP using udp2raw. Follow these instructions carefully for both Endpoint A (client) and Endpoint B (server).
1. Pre-requisites
WireGuard Installation: Ensure WireGuard is installed on both systems. This can usually be done via the package manager of your operating system (e.g., apt install wireguard for Debian-based distributions).
udp2raw Binary: Download the appropriate udp2raw binary from its GitHub Releases Page. Binaries are available for various architectures. For simplicity:
Extract the binary from the tarball (e.g., udp2raw_amd64 for most x86_64 systems).
Place the binary in a directory accessible from your PATH (e.g., /usr/local/bin).
Verify the installation: which udp2raw udp2raw -h # Should display the help menu
2. Prepare the Configuration Files
The configuration files should be located at /etc/wireguard/wg0.conf. Each endpoint has its own specific configuration:
Endpoint A: Use the wg0.conf provided earlier, replacing placeholders like keys and IPs as needed.
Endpoint B: Use the wg0.conf provided earlier.
Ensure both files reflect the IP addresses, MTU settings, and public/private keys accurately.
3. Generate WireGuard Keys
WireGuard requires public-private key pairs for secure communication. Generate them as follows:
Generate the Private Key: wg genkey > privatekey
Generate the Public Key from the private key: cat privatekey | wg pubkey > publickey
Place the private key in the [Interface] section of the respective configuration file (PrivateKey = ...) and the corresponding public key of the peer in the [Peer] section (PublicKey = ...).
Note: Never share your private keys.
4. Start the VPN Tunnel
Start the Server First (Endpoint B):
Bring up the WireGuard interface using wg-quick: sudo wg-quick up wg0
Verify that the interface is active: wg show
Start the Client (Endpoint A):
Bring up the client WireGuard interface: sudo wg-quick up wg0
Verify that the interface is active: wg show
5. Test the Connection
Once both endpoints are active, initiate traffic from Endpoint A to Endpoint B. This step ensures the udp2raw TCP socket is properly established and functioning:
If the ping succeeds, the connection is working as expected.
If it fails, check the logs for udp2raw and WireGuard on both endpoints for errors: less /var/log/udp2raw.log
Once the initial handshake completes, the tunnel will remain active as long as PersistentKeepalive is configured in the client configuration (e.g., PersistentKeepalive = 120).
6. Validate Fallback Internet Access
To confirm the fallback internet routing through Endpoint B:
On Endpoint A, run a test to confirm external connectivity: curl -I https://www.google.com
If the response headers are received, the internet routing through Endpoint B is functioning.
Verify that the traffic is routed through the WireGuard tunnel: traceroute google.com
If fallback internet access fails, ensure that NAT is correctly configured on Endpoint B: iptables -t nat -L -n
7. Troubleshooting
Log Files:
Check the udp2raw logs on both endpoints for issues (e.g., MTU mismatches, handshake failures).
Review WireGuard logs for additional details.
MTU Issues:
If large packets fail but small packets (e.g., ping) succeed, reduce the MTU (e.g., to 1280).
8. Automate Startup
To ensure the VPN starts automatically on boot:
Enable the WireGuard service: sudo systemctl enable wg-quick@wg0
Add udp2raw commands to a systemd service or the PreUp directive in wg0.conf (as shown in the configuration files).
With these steps, you now have a fully operational WireGuard tunnel over TCP, enabling secure communication between endpoints and fallback internet connectivity via the company’s infrastructure.
Conclusion
This configuration provides a robust solution for IoT Gateways operating in restrictive environments. By leveraging udp2raw, WireGuard traffic is tunneled over TCP, enabling:
Seamless Corporate Access.
Fallback Internet Connectivity through the company network when customer environments impose constraints.
This versatile setup ensures uninterrupted operations and secure communications for IoT devices. Explore the Pro Custodibus guide and udp2raw GitHub repository for additional insights.
Zerotier offers a powerful REST API that allows for seamless integration and management of your network. By default, the API is accessible on TCP port 9993. To securely interact with this API, an authentication token is required.
The authentication token is stored in the following file:
/var/lib/zerotier-one/authtoken.secret
To check if the Zerotier service is running correctly, you can use the curl command with the necessary authentication header. Here’s how to do it:
Tracking Docker container status in real time is a common challenge in DevOps. Popular tools like cAdvisor and the default Docker exporter for Prometheus often lack direct metrics for container states, meaning key insights—such as the number of containers that are running, stopped, or inactive—require complex workarounds. This limitation can complicate monitoring and lead to unreliable data.
Before creating docker_container_exporter, I relied on complex Prometheus queries to retrieve container statuses. This often involved calculations based on the last time a container was seen as active, but this approach had a major flaw: if the query time range didn’t match the last activity timestamp precisely, the data could be inaccurate or incomplete. Monitoring container states shouldn’t be this difficult.
With docker_container_exporter, this problem is solved. My tool captures real-time Docker container statuses, providing data on the number of running, stopped, and other container states, all in a Prometheus-compatible format. You can collect these metrics through a standard Prometheus polling process, or use agents like Grafana Alloy to push the data to Prometheus storage or compatible DB servers like Grafana Mimir or Thanos.
Packaging Python applications into standalone executables can simplify deployment and distribution, especially when dealing with users who may not have Python installed or when aiming for a seamless installation experience. Three prominent tools in this space are PEX, PyOxidizer, and PyInstaller. In this post, we’ll explore each of these tools, highlighting their features, how they work, and their pros and cons to help you decide which one suits your needs.
PEX stands for Python EXecutable. It creates self-contained executable Python environments that are runnable on other machines without requiring a Python interpreter or additional dependencies.
Features
Self-contained Executables: Packages all dependencies into a single file.
Virtual Environment Management: Manages dependencies in an isolated environment.
Support for Multiple Python Versions: Can target different Python versions.
Reproducible Builds: Ensures consistent builds across different environments.
How It Works
PEX files are ZIP files with a special header that makes them executable. When you run a PEX file, it sets up an isolated environment and executes your application within it. Dependencies are resolved and bundled at build time, ensuring that the executable has everything it needs to run.
Pros and Cons
Pros:
Ease of Use: Straightforward command-line interface.
Isolation: Avoids conflicts with system-installed packages.
PyOxidizer is a tool that produces distributable binaries from Python applications. It embeds the Python interpreter and your application into a single executable file.
Features
Single Executable Output: Creates a single binary without external dependencies.
Embedded Python Interpreter: Bundles a Rust-based Python interpreter.
Cross-Compilation: Supports building executables for different platforms.
Performance Optimization: Optimizes startup time and reduces runtime overhead.
How It Works
PyOxidizer uses Rust to compile your Python application into a binary. It embeds the Python interpreter and compiles your Python code into bytecode, which is then included in the binary. This approach results in a single executable that can be distributed without requiring a separate Python installation.
Pros and Cons
Pros:
No Runtime Dependencies: Users don’t need Python installed.
Cross-Platform Support: Can build executables for Windows, macOS, and Linux.
Optimized Performance: Faster startup times compared to other tools.
Cons:
Complex Configuration: Requires understanding of Rust and PyOxidizer’s configuration.
Relatively New Tool: May have less community support and fewer resources.
PyInstaller bundles a Python application and all its dependencies into a single package, which can be a directory or a standalone executable.
Features
Multi-Platform Support: Works on Windows, macOS, and Linux.
Customizable Builds: Allows inclusion or exclusion of files and dependencies.
Support for Various Libraries: Handles complex dependencies like NumPy, PyQt, etc.
One-Folder and One-File Modes: Choose between a directory of files or a single executable.
How It Works
PyInstaller analyzes your Python script to discover every other module and library your script needs to run. It then collects copies of all those files—including the active Python interpreter—and packs them into a single executable or a folder.
Pros and Cons
Pros:
Ease of Use: Simple command-line usage.
Wide Compatibility: Supports many third-party packages.
Flexible Output Options: Choose between single-file or directory output.
Cons:
Executable Size: Can produce large files.
Hidden Imports: May miss some dependencies, requiring manual specification.
Comparison
Feature
PEX
PyOxidizer
PyInstaller
Single Executable
Yes (but requires Python)
Yes
Yes
No Python Required
No
Yes
Yes
Cross-Platform
Yes (build on target OS)
Yes (cross-compilation)
Yes (build on target OS)
Ease of Use
Moderate
Complex
Easy
Executable Size
Large
Smaller
Large
Configuration
Flexible
Requires Rust knowledge
Simple
Community Support
Active
Growing
Extensive
GitHub Activity
Actively maintained
Unmaintained
Actively maintained
Conclusion
Choosing the right tool depends on your specific needs and the assurance of ongoing support:
Use PEX if you need a self-contained environment for systems where Python is available. Its active maintenance ensures that you can rely on timely updates and community support.
Use PyOxidizer if you prefer a single executable without runtime dependencies and are comfortable with Rust. Its growing GitHub activity signifies a promising future and dedicated maintenance.
Use PyInstaller if you value simplicity and extensive community support. Its active maintenance status means you can expect regular updates and a wealth of community resources.
In this post, I’ll demonstrate how powerful and flexible the .env file can be when setting up a compose.yaml for Docker Compose. This approach allows for easy management of environment variables, making your Docker configurations more dynamic and manageable.
However, to make the variables defined in the .env file available within the Docker container, you need to add a couple of lines to your compose.yaml file:
After updating the compose.yaml file, run the docker compose up command again. This time, you’ll notice that the UBUNTU_VERSION environment variable is now included in the container’s environment:
This is incredibly convenient because maintaining the .env file allows you to easily manage environment variables across different services without modifying the compose.yaml file each time. This example clearly illustrates how powerful and useful it is to use .env files in Docker Compose configurations.